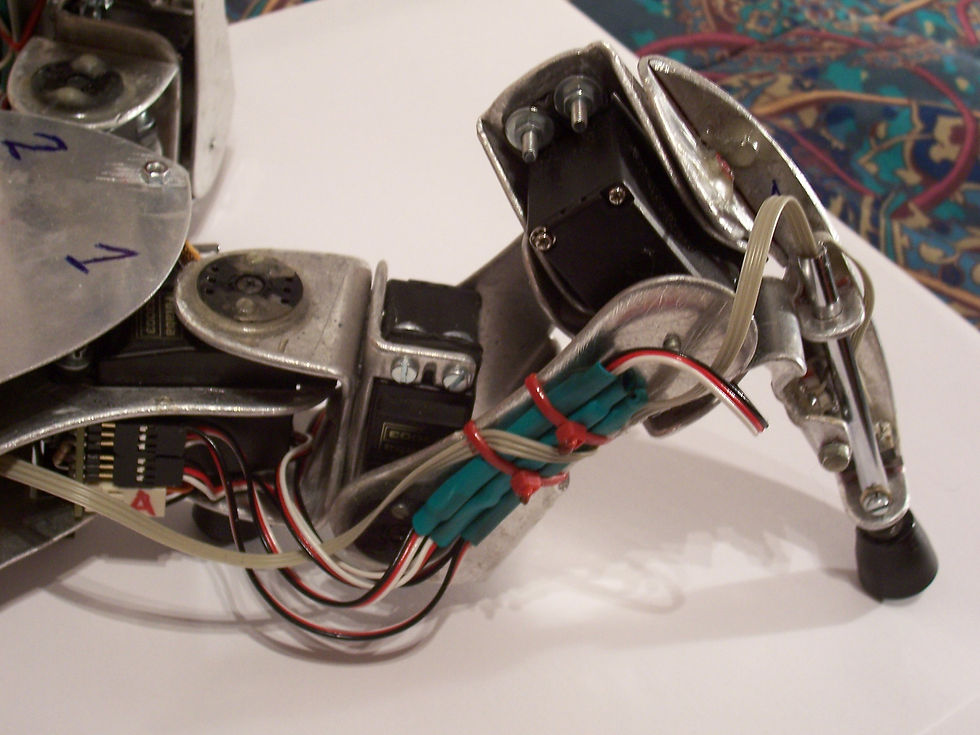
Maqueta de Pruebas
El primer paso hacia la construcción de un artefacto tan complejo como es un robot hexápodo fue el estudio de la generación de señales PWM, comunicaciones y posicionamiento de un robot basado en articulaciones rotacionales, además de la puesta a prueba de algunos diseños preliminares. Con tal fin se construyeron dos modelos de pata sobre un mismo soporte, ambos con distinto diseño mecánico y circuito de control: el primero era un modelo carente de sensores de contacto, y cuya placa de control sólo podía operarse mediante tres botones físicos; el segundo disponía de sensores de contacto activados en los sentidos descendente y de avance, y su placa de control podía operarse a través de un canal serie o de un teclado matricial conectado físicamente. El código desarrollado en estas maquetas fue directamente reutilizado en el firmware de las placas de control de cada pata.
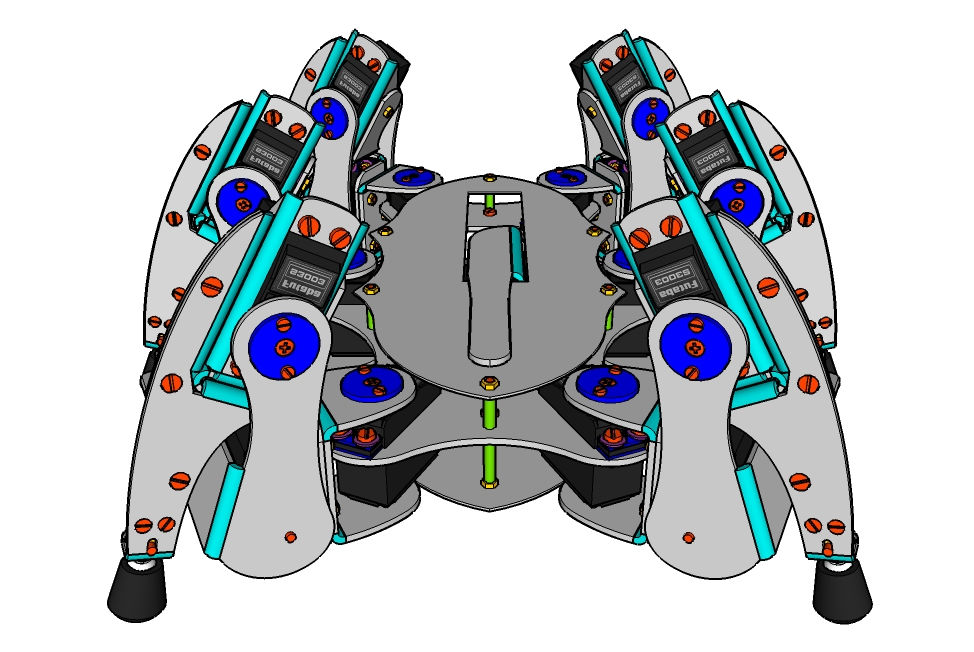
MIHRO (Mobile Intelligent Hexapod Robot)
MIHRO fue el objeto del Proyecto de Final de Carrera con el que terminé Ingeniería Técnica. Se trata de un robot caminador hexápodo con tres grados de movilidad y dos sensores de contacto en cada pata, completamente hecho a mano. El proyecto abarcó el diseño CAD de la mecánica y el hardware del robot y de las maquetas previas, la fabricación y mecanización de todas las piezas de su esqueleto, y la fabricación y programación de todas sus placas electrónicas. A su finalización el robot podía caminar gracias a un algoritmo básico, recibía órdenes desde un teclado matricial cableado a la placa de control principal, y se alimentaba a través de un cordón umbilical, por lo que no era autónomo.



















































Diseño
El diseño de hardware, esquemático y PCB se realizó íntegramente en OrCAD. El diseño mecánico, tanto del robot como de las maquetas, se realizó utilizando la herramienta SketchUp. Se valoraron múltiples diseños previos antes de llegar al diseño final, y una vez éste estuvo completo, se coordinaron todos los pasos de la fabricación y el montaje, teniendo en consideración la forma en que se deformarían las partes metálicas durante su mecanización y el modo en que debían instalarse cada una de las 853 piezas que lo componían, incluyendo tornillos, arandelas y elementos elásticos.
Construcción
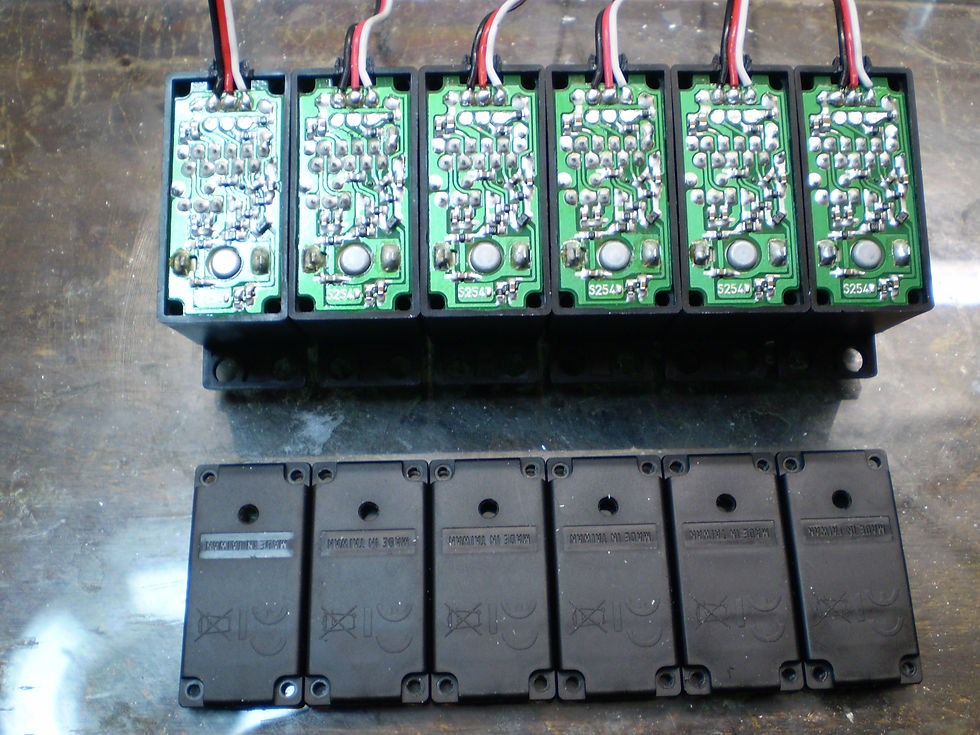
El robot se construyó usando chapa de aluminio de 1, 2 y 2,5 mm, que tuvo que ser cortada, limada, agujereada y doblada con las herramientas que podrían encontrarse en cualquier taller doméstico. Se utilizaron servos de aeromodelismo muy básicos, principalmente por motivos de presupuesto, que tuvieron que ser modificados para añadir ejes pasivos traseros. Debido a su reducido tamaño, se hizo necesario fabricar las placas esclavas en PCB. La placa maestra, en cambio, fue tomada del prototipo en placa de topos que sirvió de entrenadora en la maqueta.
Estructura
El robot contaba con 8 placas electrónicas; la más simple era una fuente de alimentación de 5V para la electrónica de control, que tomaba los 6V que llegaban a través del cordón umbilical, del que los servos se alimentaban directamente. Las otras 7 eran las placas de control: 6 pequeñas placas esclavas, una para el control de cada pata, y una placa de control maestra, que además gestionaba las comunicaciones y el teclado de interfaz. Todas ellas iban equipadas con un microcontrolador de 8 bits, conectadas mediante un bus I2C, y fueron totalmente programadas en ensamblador. El firmware instalado permitía controlar los servos con una resolución de 0,72º.
